
بایگانی نوشتهها


موتورهای DC بدون جاروبک چیستند؟
درک اصول و کاربرد موتورهای با راندمان بالا: ۱ از ۳
یک موتور، انرژی الکتریکی تأمینشده را به انرژی مکانیکی تبدیل میکند. انواع مختلفی از موتورها رایج هستند. در میان این موتورها، موتورهای جریان مستقیم بدون جاروبک (BLDC) دارای راندمان بالا و قابلیت کنترل عالی هستند و بهطور گسترده در بسیاری از کاربردها مورد استفاده قرار میگیرند. موتور BLDC نسبت به سایر انواع موتورها از مزایای صرفهجویی در مصرف برق برخوردار است.
موتورها ماشینهای انتقال قدرت هستند
وقتی مهندسان با چالش طراحی تجهیزات الکتریکی برای انجام وظایف مکانیکی مواجه میشوند، ممکن است در مورد چگونگی تبدیل سیگنالهای الکتریکی به انرژی فکر کنند. بنابراین محرکها و موتورها از جمله دستگاههایی هستند که سیگنالهای الکتریکی را به حرکت تبدیل میکنند. موتورها انرژی الکتریکی را به انرژی مکانیکی تبدیل میکنند.
سادهترین نوع موتور، موتور DC جاروبکدار است. در این نوع موتور، جریان الکتریکی از طریق سیمپیچهایی که در یک میدان مغناطیسی ثابت قرار گرفتهاند، عبور میکند. جریان، میدانهای مغناطیسی را در سیمپیچها ایجاد میکند؛ این باعث چرخش مجموعه سیمپیچ میشود، زیرا هر سیمپیچ از قطب همنام خود دور شده و به سمت قطب ناهمنام میدان ثابت کشیده میشود. برای حفظ چرخش، لازم است جریان به طور مداوم معکوس شود - به طوری که قطبهای سیمپیچ به طور مداوم تغییر جهت دهند و باعث شوند سیمپیچها به "دنبال کردن" قطبهای ثابت ناهمنام ادامه دهند. برق سیمپیچها از طریق جاروبکهای رسانای ثابت که با یک کموتاتور چرخان تماس برقرار میکنند، تأمین میشود. چرخش کموتاتور است که باعث معکوس شدن جریان از طریق سیمپیچها میشود. کموتاتور و جاروبکها اجزای کلیدی هستند که موتور DC جاروبکدار را از سایر انواع موتور متمایز میکنند. شکل 1 اصل کلی موتور جاروبکدار را نشان میدهد.
شکل ۱: عملکرد موتور DC جاروبکدار.
جاروبکهای ثابت، انرژی الکتریکی را به کموتاتور چرخان تأمین میکنند. با چرخش کموتاتور، جهت جریان ورودی به سیمپیچها به طور مداوم تغییر میکند و قطبهای سیمپیچ را معکوس میکند تا سیمپیچها چرخش راستگرد خود را حفظ کنند. کموتاتور میچرخد زیرا به روتوری که سیمپیچها روی آن نصب شدهاند، متصل است.
انواع موتور رایج
موتورها بر اساس نوع توان (AC یا DC) و روش تولید چرخش (شکل 2) متفاوت هستند. در زیر، به طور خلاصه به ویژگیها و کاربردهای هر نوع میپردازیم.
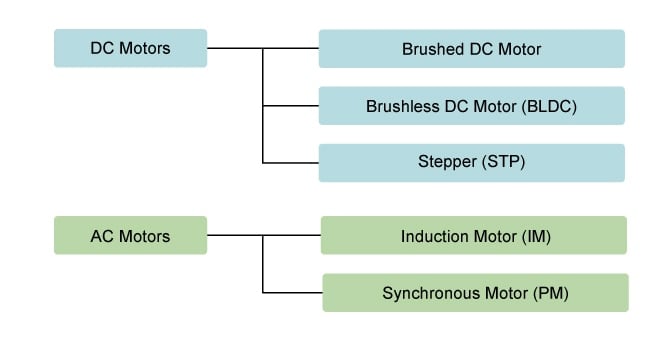
شکل ۲: انواع مختلف موتورها
موتورهای جریان مستقیم جاروبکدار، با طراحی ساده و کنترل آسان، به طور گسترده برای باز و بسته کردن سینیهای دیسک استفاده میشوند. در خودروها، اغلب از آنها برای جمع کردن، باز کردن و قرار دادن شیشههای جانبی برقی استفاده میشود. هزینه پایین این موتورها، آنها را برای بسیاری از کاربردها مناسب میکند. با این حال، یکی از معایب این است که جاروبکها و کموتاتورها به دلیل تماس مداوم، نسبتاً سریع ساییده میشوند و نیاز به تعویض مکرر و نگهداری دورهای دارند.
یک موتور پلهای توسط پالسها هدایت میشود؛ با هر پالس، زاویه (پله) خاصی را طی میکند. از آنجا که چرخش دقیقاً توسط تعداد پالسهای دریافتی کنترل میشود، این موتورها به طور گسترده برای پیادهسازی تنظیمات موقعیتی استفاده میشوند. به عنوان مثال، آنها اغلب برای کنترل تغذیه کاغذ در دستگاههای فکس و چاپگرها استفاده میشوند - زیرا این دستگاهها کاغذ را در مراحل ثابت تغذیه میکنند که به راحتی با شمارش پالسها مرتبط هستند. مکث نیز میتواند به راحتی کنترل شود، زیرا چرخش موتور بلافاصله پس از قطع سیگنال پالس متوقف میشود.
در موتورهای سنکرون، چرخش با فرکانس جریان تغذیه همزمان است. این موتورها اغلب برای چرخاندن سینیهای چرخان در اجاقهای مایکروویو استفاده میشوند؛ میتوان از چرخدندههای کاهنده در واحد موتور برای به دست آوردن سرعت چرخش مناسب برای گرم کردن غذا استفاده کرد. در موتورهای القایی نیز، سرعت چرخش با فرکانس تغییر میکند؛ اما حرکت همزمان نیست. در گذشته، این موتورها اغلب در پنکههای برقی و ماشینهای لباسشویی استفاده میشدند.
انواع مختلفی از موتورها به طور رایج استفاده میشوند. در این جلسه، به مزایا و کاربردهای موتورهای DC بدون جاروبک میپردازیم.
چرا موتورهای BLDC میچرخند؟
همانطور که از نامشان پیداست، موتورهای جریان مستقیم بدون جاروبک از جاروبک استفاده نمیکنند. در موتورهای جاروبکدار، جاروبکها جریان را از طریق کموتاتور به سیمپیچهای روی روتور منتقل میکنند. پس چگونه یک موتور بدون جاروبک جریان را به سیمپیچهای روتور منتقل میکند؟ این اتفاق نمیافتد - زیرا سیمپیچها روی روتور قرار ندارند. در عوض، روتور یک آهنربای دائمی است. سیمپیچها نمیچرخند، بلکه در جای خود روی استاتور ثابت شدهاند. از آنجا که سیمپیچها حرکت نمیکنند، نیازی به جاروبکها و کموتاتور نیست. (شکل ۳ را ببینید.)
در موتور جاروبکدار، چرخش با کنترل میدانهای مغناطیسی تولید شده توسط سیمپیچهای روی روتور حاصل میشود، در حالی که میدان مغناطیسی تولید شده توسط آهنرباهای ثابت ثابت میماند. برای تغییر سرعت چرخش، ولتاژ سیمپیچها را تغییر میدهید. در یک موتور BLDC، آهنربای دائمی است که میچرخد؛ چرخش با تغییر جهت میدانهای مغناطیسی تولید شده توسط سیمپیچهای ثابت اطراف حاصل میشود. برای کنترل چرخش، بزرگی و جهت جریان را در این سیمپیچها تنظیم میکنید.
شکل ۳: یک موتور BLDC.
از آنجایی که روتور یک آهنربای دائمی است، به جریان نیاز ندارد و نیاز به جاروبک و کموتاتور را از بین میبرد. جریان سیمپیچهای ثابت از خارج کنترل میشود.
مزایای موتورهای BLDC
یک موتور BLDC با سه سیمپیچ روی استاتور، شش سیم الکتریکی (دو سیم به هر سیمپیچ) خواهد داشت که از این سیمپیچها امتداد یافتهاند. در بیشتر پیادهسازیها، سه سیم از این سیمها به صورت داخلی متصل میشوند و سه سیم باقیمانده از بدنه موتور امتداد مییابند (برخلاف دو سیمی که از موتور جاروبکدار که قبلاً توضیح داده شد، امتداد مییابند). سیمکشی در بدنه موتور BLDC پیچیدهتر از اتصال ساده ترمینالهای مثبت و منفی سلول برق است. در جلسه دوم این مجموعه، نحوه کار این موتورها را با دقت بیشتری بررسی خواهیم کرد. در ادامه، با بررسی مزایای موتورهای BLDC نتیجهگیری میکنیم.
یکی از مزایای بزرگ، راندمان است، زیرا این موتورها میتوانند به طور مداوم در حداکثر نیروی چرخشی (گشتاور) کنترل شوند. در مقابل، موتورهای براش، تنها در نقاط خاصی از چرخش به حداکثر گشتاور میرسند. برای اینکه یک موتور براش بتواند گشتاوری مشابه مدل بدون براش ارائه دهد، باید از آهنرباهای بزرگتری استفاده کند. به همین دلیل است که حتی موتورهای BLDC کوچک نیز میتوانند قدرت قابل توجهی ارائه دهند.
دومین مزیت بزرگ - مرتبط با مزیت اول - قابلیت کنترل است. موتورهای BLDC را میتوان با استفاده از مکانیسمهای بازخورد، برای تحویل دقیق گشتاور و سرعت چرخش مورد نظر کنترل کرد. کنترل دقیق به نوبه خود مصرف انرژی و تولید گرما را کاهش میدهد و - در مواردی که موتورها با باتری تغذیه میشوند - عمر باتری را افزایش میدهد.
موتورهای BLDC همچنین به لطف عدم وجود جاروبک، دوام بالا و تولید نویز الکتریکی کمی دارند. در موتورهای جاروبکدار، جاروبکها و کموتاتور در نتیجه تماس مداوم در حال حرکت، فرسوده میشوند و همچنین در محل تماس، جرقه تولید میکنند. نویز الکتریکی، به ویژه، نتیجه جرقههای قوی است که معمولاً در مناطقی که جاروبکها از روی شکافهای کموتاتور عبور میکنند، رخ میدهد. به همین دلیل است که موتورهای BLDC اغلب در کاربردهایی که اجتناب از نویز الکتریکی مهم است، ترجیح داده میشوند.
کاربردهای ایدهآل برای موتورهای BLDC
ما دیدهایم که موتورهای BLDC راندمان و قابلیت کنترل بالایی دارند و عمر عملیاتی طولانی دارند. پس آنها برای چه چیزی مفید هستند؟ به دلیل راندمان و طول عمرشان، به طور گسترده در دستگاههایی که به طور مداوم کار میکنند، استفاده میشوند. آنها مدتهاست که در ماشینهای لباسشویی، تهویه مطبوع و سایر لوازم الکترونیکی مصرفی مورد استفاده قرار میگیرند؛ و اخیراً، در پنکهها نیز ظاهر میشوند، جایی که راندمان بالای آنها به کاهش قابل توجه مصرف برق کمک کرده است.
آنها همچنین برای به حرکت درآوردن ماشینهای خلاء مورد استفاده قرار میگیرند. در یک مورد، تغییر در برنامه کنترل منجر به جهش بزرگی در سرعت چرخش شد - نمونهای از قابلیت کنترل فوقالعادهای که این موتورها ارائه میدهند.
موتورهای BLDC همچنین برای چرخاندن هارد دیسکها استفاده میشوند، که دوام آنها باعث میشود هارد دیسکها در درازمدت به طور قابل اعتمادی کار کنند، در حالی که راندمان انرژی آنها به کاهش انرژی در حوزهای که این موضوع به طور فزایندهای اهمیت پیدا میکند، کمک میکند.
به سوی استفاده گستردهتر در آینده
میتوانیم انتظار داشته باشیم که در آینده شاهد استفاده از موتورهای BLDC در طیف وسیعتری از کاربردها باشیم. به عنوان مثال، آنها احتمالاً به طور گسترده برای هدایت رباتهای خدماتی - رباتهای کوچکی که در زمینههایی غیر از تولید خدمات ارائه میدهند - مورد استفاده قرار خواهند گرفت. ممکن است تصور شود که موتورهای پلهای در این نوع کاربرد، که در آن میتوان از پالسها برای کنترل دقیق موقعیت استفاده کرد، مناسبتر هستند. اما موتورهای BLDC برای کنترل نیرو مناسبتر هستند. و با یک موتور پلهای، حفظ موقعیت ساختاری مانند بازوی ربات به جریان نسبتاً زیاد و مداوم نیاز دارد. با یک موتور BLDC، تنها چیزی که مورد نیاز است، جریانی متناسب با نیروی خارجی است - که امکان کنترل با راندمان انرژی بیشتر را فراهم میکند. موتورهای BLDC همچنین ممکن است جایگزین موتورهای DC ساده جاروبکدار در چرخ دستیهای گلف و چرخ دستیهای حمل و نقل شوند. موتورهای BLDC علاوه بر راندمان بهتر، میتوانند کنترل دقیقتری نیز ارائه دهند - که به نوبه خود میتواند عمر باتری را بیشتر افزایش دهد.
موتورهای BLDC همچنین برای پهپادها ایدهآل هستند. توانایی آنها در ارائه کنترل دقیق، آنها را به ویژه برای پهپادهای چندملخه مناسب میکند، جایی که وضعیت پهپاد با کنترل دقیق سرعت چرخش هر روتور کنترل میشود.
در این جلسه، دیدیم که چگونه موتورهای BLDC راندمان، کنترلپذیری و طول عمر عالی ارائه میدهند. اما کنترل دقیق و مناسب برای بهرهبرداری کامل از پتانسیل این موتورها ضروری است. در جلسه بعدی، به نحوه کار این موتورها خواهیم پرداخت.
اطلاعات بیشتر
درک اصول و کاربرد موتورهای با راندمان بالا: ۱ از ۳
یک موتور، انرژی الکتریکی تأمینشده را به انرژی مکانیکی تبدیل میکند. انواع مختلفی از موتورها رایج هستند. در میان این موتورها، موتورهای جریان مستقیم بدون جاروبک (BLDC) دارای راندمان بالا و قابلیت کنترل عالی هستند و بهطور گسترده در بسیاری از کاربردها مورد استفاده قرار میگیرند. موتور BLDC نسبت به سایر انواع موتورها از مزایای صرفهجویی در مصرف برق برخوردار است.
موتورها ماشینهای انتقال قدرت هستند
وقتی مهندسان با چالش طراحی تجهیزات الکتریکی برای انجام وظایف مکانیکی مواجه میشوند، ممکن است در مورد چگونگی تبدیل سیگنالهای الکتریکی به انرژی فکر کنند. بنابراین محرکها و موتورها از جمله دستگاههایی هستند که سیگنالهای الکتریکی را به حرکت تبدیل میکنند. موتورها انرژی الکتریکی را به انرژی مکانیکی تبدیل میکنند.
سادهترین نوع موتور، موتور DC جاروبکدار است. در این نوع موتور، جریان الکتریکی از طریق سیمپیچهایی که در یک میدان مغناطیسی ثابت قرار گرفتهاند، عبور میکند. جریان، میدانهای مغناطیسی را در سیمپیچها ایجاد میکند؛ این باعث چرخش مجموعه سیمپیچ میشود، زیرا هر سیمپیچ از قطب همنام خود دور شده و به سمت قطب ناهمنام میدان ثابت کشیده میشود. برای حفظ چرخش، لازم است جریان به طور مداوم معکوس شود - به طوری که قطبهای سیمپیچ به طور مداوم تغییر جهت دهند و باعث شوند سیمپیچها به "دنبال کردن" قطبهای ثابت ناهمنام ادامه دهند. برق سیمپیچها از طریق جاروبکهای رسانای ثابت که با یک کموتاتور چرخان تماس برقرار میکنند، تأمین میشود. چرخش کموتاتور است که باعث معکوس شدن جریان از طریق سیمپیچها میشود. کموتاتور و جاروبکها اجزای کلیدی هستند که موتور DC جاروبکدار را از سایر انواع موتور متمایز میکنند. شکل 1 اصل کلی موتور جاروبکدار را نشان میدهد.
شکل ۱: عملکرد موتور DC جاروبکدار.
جاروبکهای ثابت، انرژی الکتریکی را به کموتاتور چرخان تأمین میکنند. با چرخش کموتاتور، جهت جریان ورودی به سیمپیچها به طور مداوم تغییر میکند و قطبهای سیمپیچ را معکوس میکند تا سیمپیچها چرخش راستگرد خود را حفظ کنند. کموتاتور میچرخد زیرا به روتوری که سیمپیچها روی آن نصب شدهاند، متصل است.
انواع موتور رایج
موتورها بر اساس نوع توان (AC یا DC) و روش تولید چرخش (شکل 2) متفاوت هستند. در زیر، به طور خلاصه به ویژگیها و کاربردهای هر نوع میپردازیم.
شکل ۲: انواع مختلف موتورها
موتورهای جریان مستقیم جاروبکدار، با طراحی ساده و کنترل آسان، به طور گسترده برای باز و بسته کردن سینیهای دیسک استفاده میشوند. در خودروها، اغلب از آنها برای جمع کردن، باز کردن و قرار دادن شیشههای جانبی برقی استفاده میشود. هزینه پایین این موتورها، آنها را برای بسیاری از کاربردها مناسب میکند. با این حال، یکی از معایب این است که جاروبکها و کموتاتورها به دلیل تماس مداوم، نسبتاً سریع ساییده میشوند و نیاز به تعویض مکرر و نگهداری دورهای دارند.
یک موتور پلهای توسط پالسها هدایت میشود؛ با هر پالس، زاویه (پله) خاصی را طی میکند. از آنجا که چرخش دقیقاً توسط تعداد پالسهای دریافتی کنترل میشود، این موتورها به طور گسترده برای پیادهسازی تنظیمات موقعیتی استفاده میشوند. به عنوان مثال، آنها اغلب برای کنترل تغذیه کاغذ در دستگاههای فکس و چاپگرها استفاده میشوند - زیرا این دستگاهها کاغذ را در مراحل ثابت تغذیه میکنند که به راحتی با شمارش پالسها مرتبط هستند. مکث نیز میتواند به راحتی کنترل شود، زیرا چرخش موتور بلافاصله پس از قطع سیگنال پالس متوقف میشود.
در موتورهای سنکرون، چرخش با فرکانس جریان تغذیه همزمان است. این موتورها اغلب برای چرخاندن سینیهای چرخان در اجاقهای مایکروویو استفاده میشوند؛ میتوان از چرخدندههای کاهنده در واحد موتور برای به دست آوردن سرعت چرخش مناسب برای گرم کردن غذا استفاده کرد. در موتورهای القایی نیز، سرعت چرخش با فرکانس تغییر میکند؛ اما حرکت همزمان نیست. در گذشته، این موتورها اغلب در پنکههای برقی و ماشینهای لباسشویی استفاده میشدند.
انواع مختلفی از موتورها به طور رایج استفاده میشوند. در این جلسه، به مزایا و کاربردهای موتورهای DC بدون جاروبک میپردازیم.
چرا موتورهای BLDC میچرخند؟
همانطور که از نامشان پیداست، موتورهای جریان مستقیم بدون جاروبک از جاروبک استفاده نمیکنند. در موتورهای جاروبکدار، جاروبکها جریان را از طریق کموتاتور به سیمپیچهای روی روتور منتقل میکنند. پس چگونه یک موتور بدون جاروبک جریان را به سیمپیچهای روتور منتقل میکند؟ این اتفاق نمیافتد - زیرا سیمپیچها روی روتور قرار ندارند. در عوض، روتور یک آهنربای دائمی است. سیمپیچها نمیچرخند، بلکه در جای خود روی استاتور ثابت شدهاند. از آنجا که سیمپیچها حرکت نمیکنند، نیازی به جاروبکها و کموتاتور نیست. (شکل ۳ را ببینید.)
در موتور جاروبکدار، چرخش با کنترل میدانهای مغناطیسی تولید شده توسط سیمپیچهای روی روتور حاصل میشود، در حالی که میدان مغناطیسی تولید شده توسط آهنرباهای ثابت ثابت میماند. برای تغییر سرعت چرخش، ولتاژ سیمپیچها را تغییر میدهید. در یک موتور BLDC، آهنربای دائمی است که میچرخد؛ چرخش با تغییر جهت میدانهای مغناطیسی تولید شده توسط سیمپیچهای ثابت اطراف حاصل میشود. برای کنترل چرخش، بزرگی و جهت جریان را در این سیمپیچها تنظیم میکنید.
شکل ۳: یک موتور BLDC.
از آنجایی که روتور یک آهنربای دائمی است، به جریان نیاز ندارد و نیاز به جاروبک و کموتاتور را از بین میبرد. جریان سیمپیچهای ثابت از خارج کنترل میشود.
مزایای موتورهای BLDC
یک موتور BLDC با سه سیمپیچ روی استاتور، شش سیم الکتریکی (دو سیم به هر سیمپیچ) خواهد داشت که از این سیمپیچها امتداد یافتهاند. در بیشتر پیادهسازیها، سه سیم از این سیمها به صورت داخلی متصل میشوند و سه سیم باقیمانده از بدنه موتور امتداد مییابند (برخلاف دو سیمی که از موتور جاروبکدار که قبلاً توضیح داده شد، امتداد مییابند). سیمکشی در بدنه موتور BLDC پیچیدهتر از اتصال ساده ترمینالهای مثبت و منفی سلول برق است. در جلسه دوم این مجموعه، نحوه کار این موتورها را با دقت بیشتری بررسی خواهیم کرد. در ادامه، با بررسی مزایای موتورهای BLDC نتیجهگیری میکنیم.
یکی از مزایای بزرگ، راندمان است، زیرا این موتورها میتوانند به طور مداوم در حداکثر نیروی چرخشی (گشتاور) کنترل شوند. در مقابل، موتورهای براش، تنها در نقاط خاصی از چرخش به حداکثر گشتاور میرسند. برای اینکه یک موتور براش بتواند گشتاوری مشابه مدل بدون براش ارائه دهد، باید از آهنرباهای بزرگتری استفاده کند. به همین دلیل است که حتی موتورهای BLDC کوچک نیز میتوانند قدرت قابل توجهی ارائه دهند.
دومین مزیت بزرگ - مرتبط با مزیت اول - قابلیت کنترل است. موتورهای BLDC را میتوان با استفاده از مکانیسمهای بازخورد، برای تحویل دقیق گشتاور و سرعت چرخش مورد نظر کنترل کرد. کنترل دقیق به نوبه خود مصرف انرژی و تولید گرما را کاهش میدهد و - در مواردی که موتورها با باتری تغذیه میشوند - عمر باتری را افزایش میدهد.
موتورهای BLDC همچنین به لطف عدم وجود جاروبک، دوام بالا و تولید نویز الکتریکی کمی دارند. در موتورهای جاروبکدار، جاروبکها و کموتاتور در نتیجه تماس مداوم در حال حرکت، فرسوده میشوند و همچنین در محل تماس، جرقه تولید میکنند. نویز الکتریکی، به ویژه، نتیجه جرقههای قوی است که معمولاً در مناطقی که جاروبکها از روی شکافهای کموتاتور عبور میکنند، رخ میدهد. به همین دلیل است که موتورهای BLDC اغلب در کاربردهایی که اجتناب از نویز الکتریکی مهم است، ترجیح داده میشوند.
کاربردهای ایدهآل برای موتورهای BLDC
ما دیدهایم که موتورهای BLDC راندمان و قابلیت کنترل بالایی دارند و عمر عملیاتی طولانی دارند. پس آنها برای چه چیزی مفید هستند؟ به دلیل راندمان و طول عمرشان، به طور گسترده در دستگاههایی که به طور مداوم کار میکنند، استفاده میشوند. آنها مدتهاست که در ماشینهای لباسشویی، تهویه مطبوع و سایر لوازم الکترونیکی مصرفی مورد استفاده قرار میگیرند؛ و اخیراً، در پنکهها نیز ظاهر میشوند، جایی که راندمان بالای آنها به کاهش قابل توجه مصرف برق کمک کرده است.
آنها همچنین برای به حرکت درآوردن ماشینهای خلاء مورد استفاده قرار میگیرند. در یک مورد، تغییر در برنامه کنترل منجر به جهش بزرگی در سرعت چرخش شد - نمونهای از قابلیت کنترل فوقالعادهای که این موتورها ارائه میدهند.
موتورهای BLDC همچنین برای چرخاندن هارد دیسکها استفاده میشوند، که دوام آنها باعث میشود هارد دیسکها در درازمدت به طور قابل اعتمادی کار کنند، در حالی که راندمان انرژی آنها به کاهش انرژی در حوزهای که این موضوع به طور فزایندهای اهمیت پیدا میکند، کمک میکند.
به سوی استفاده گستردهتر در آینده
میتوانیم انتظار داشته باشیم که در آینده شاهد استفاده از موتورهای BLDC در طیف وسیعتری از کاربردها باشیم. به عنوان مثال، آنها احتمالاً به طور گسترده برای هدایت رباتهای خدماتی - رباتهای کوچکی که در زمینههایی غیر از تولید خدمات ارائه میدهند - مورد استفاده قرار خواهند گرفت. ممکن است تصور شود که موتورهای پلهای در این نوع کاربرد، که در آن میتوان از پالسها برای کنترل دقیق موقعیت استفاده کرد، مناسبتر هستند. اما موتورهای BLDC برای کنترل نیرو مناسبتر هستند. و با یک موتور پلهای، حفظ موقعیت ساختاری مانند بازوی ربات به جریان نسبتاً زیاد و مداوم نیاز دارد. با یک موتور BLDC، تنها چیزی که مورد نیاز است، جریانی متناسب با نیروی خارجی است - که امکان کنترل با راندمان انرژی بیشتر را فراهم میکند. موتورهای BLDC همچنین ممکن است جایگزین موتورهای DC ساده جاروبکدار در چرخ دستیهای گلف و چرخ دستیهای حمل و نقل شوند. موتورهای BLDC علاوه بر راندمان بهتر، میتوانند کنترل دقیقتری نیز ارائه دهند - که به نوبه خود میتواند عمر باتری را بیشتر افزایش دهد.
موتورهای BLDC همچنین برای پهپادها ایدهآل هستند. توانایی آنها در ارائه کنترل دقیق، آنها را به ویژه برای پهپادهای چندملخه مناسب میکند، جایی که وضعیت پهپاد با کنترل دقیق سرعت چرخش هر روتور کنترل میشود.
در این جلسه، دیدیم که چگونه موتورهای BLDC راندمان، کنترلپذیری و طول عمر عالی ارائه میدهند. اما کنترل دقیق و مناسب برای بهرهبرداری کامل از پتانسیل این موتورها ضروری است. در جلسه بعدی، به نحوه کار این موتورها خواهیم پرداخت.